1_SetMultipleMotors_Block
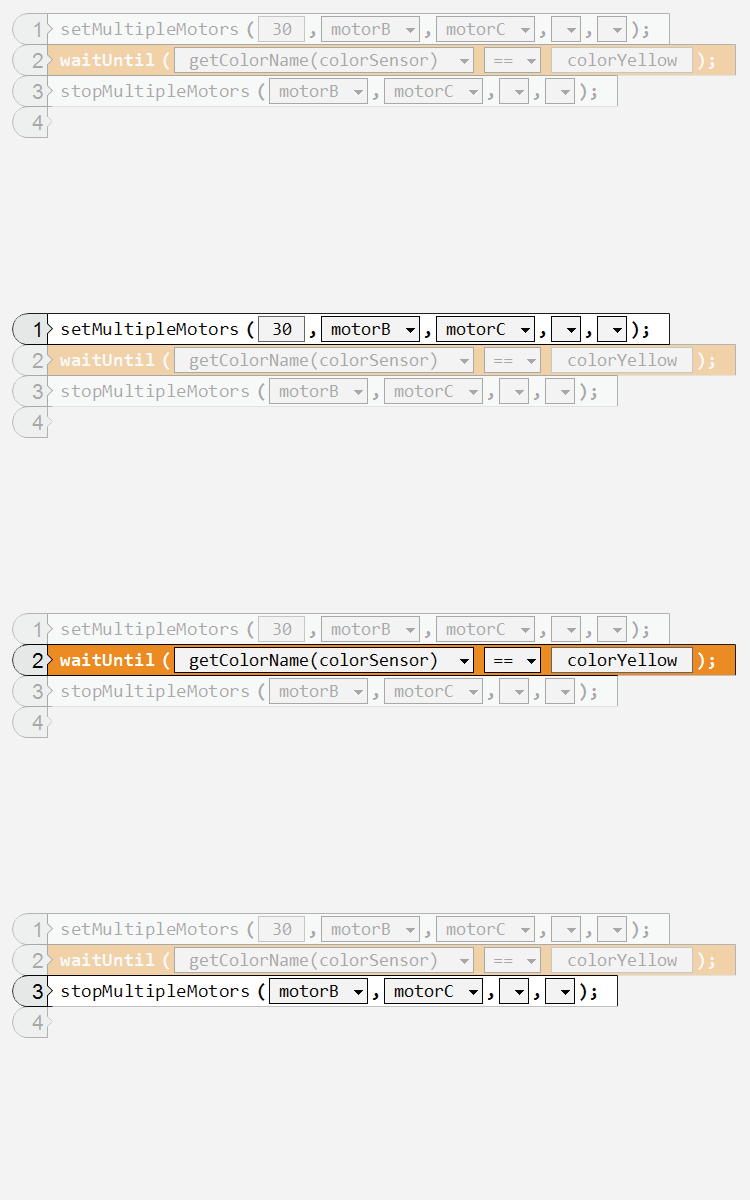
Turns motors B and C on at 30% power.
Starts moving the robot forward.
StopMultipleMotors block will be needed to stop the robot later.
2_WaitUntil_
Stops the program from processing
additional commands until the Color Sensor value equals to 'colorYellow'.
Robot waits until it sees Yellow line on the black road.
3_StopMultipleMotors_Blah
Stops motors B and C.
Stops the robot (after the WaitUntil block finishes).