1_Forward_Block
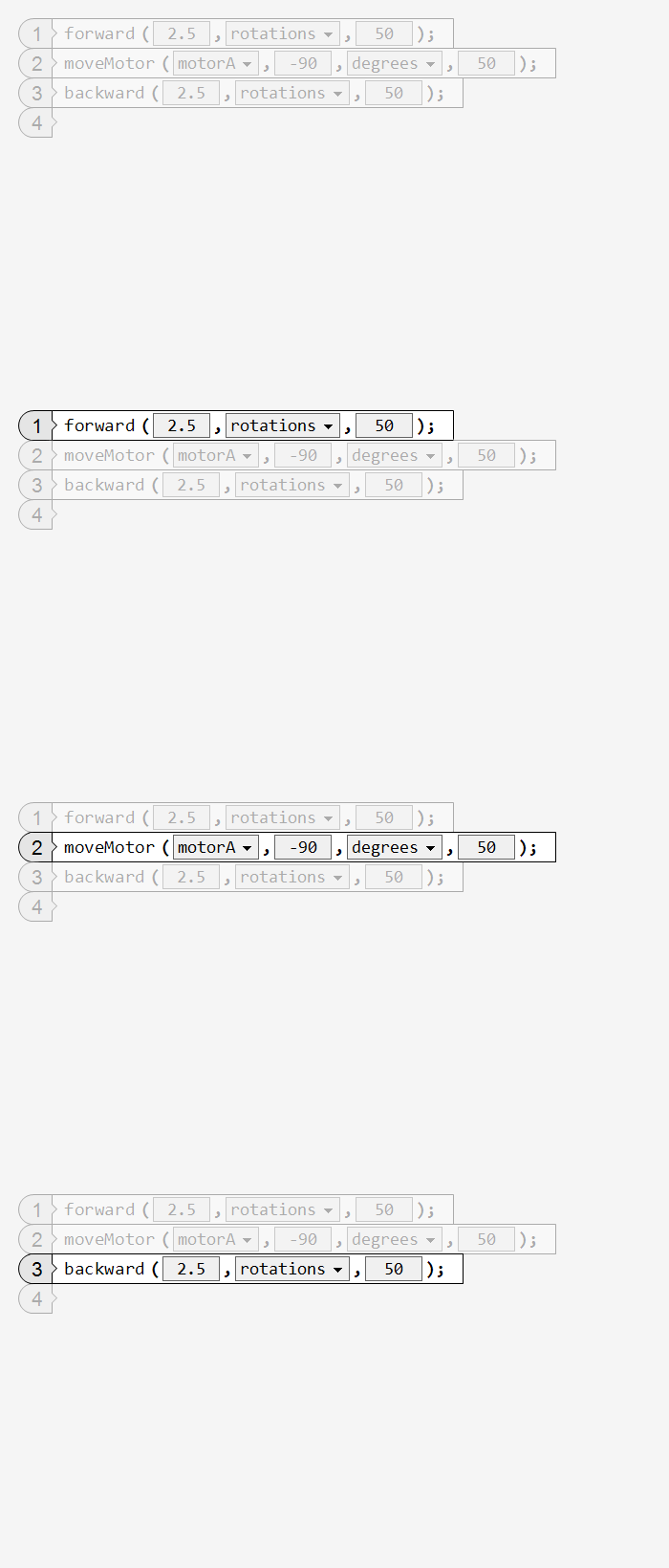
Moves the robot forward 2.5 rotations at 50% power. The robot drives forward towards the object.
2_MoveMotor_Blah
Moves the arm motor for -90 degrees. This lowers the robot's arm onto the object, assuming the arm
was raised all the way up in the beginning.
3_Backward_Block
Moves the robot backwards 2.5 rotation
at 50% power.
The robot drives backwards to bring
the object back to the beginning.