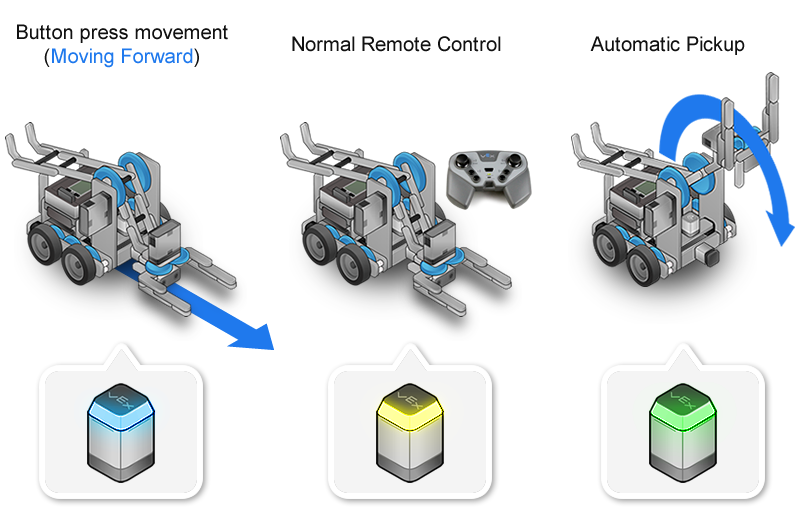
LED Feedback for Automatic Pickup
Just like the LED Feedback activity from the previous page, program the Touch LED to output colors depending on the actions the robot is performing.
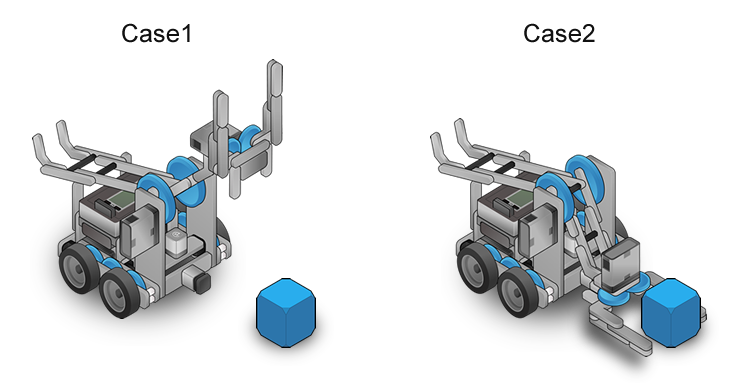
Mini Challenge 1: Advanced Automatic Pickup
The automatic pickup behavior only works if the robot starts with its arm down and claw in the open position. Expand on your existing program, so that the robot makes sure to lower its arm and open the claw before moving forward to pick up an object!
|
You can lower the arm until the bump switch is pressed in to confirm that the arm is in the downward position.
You can open the claw for a certain amount of time, rather than degrees, to prevent program flow from getting stuck at that point in the program.