Program Review: Claw Control
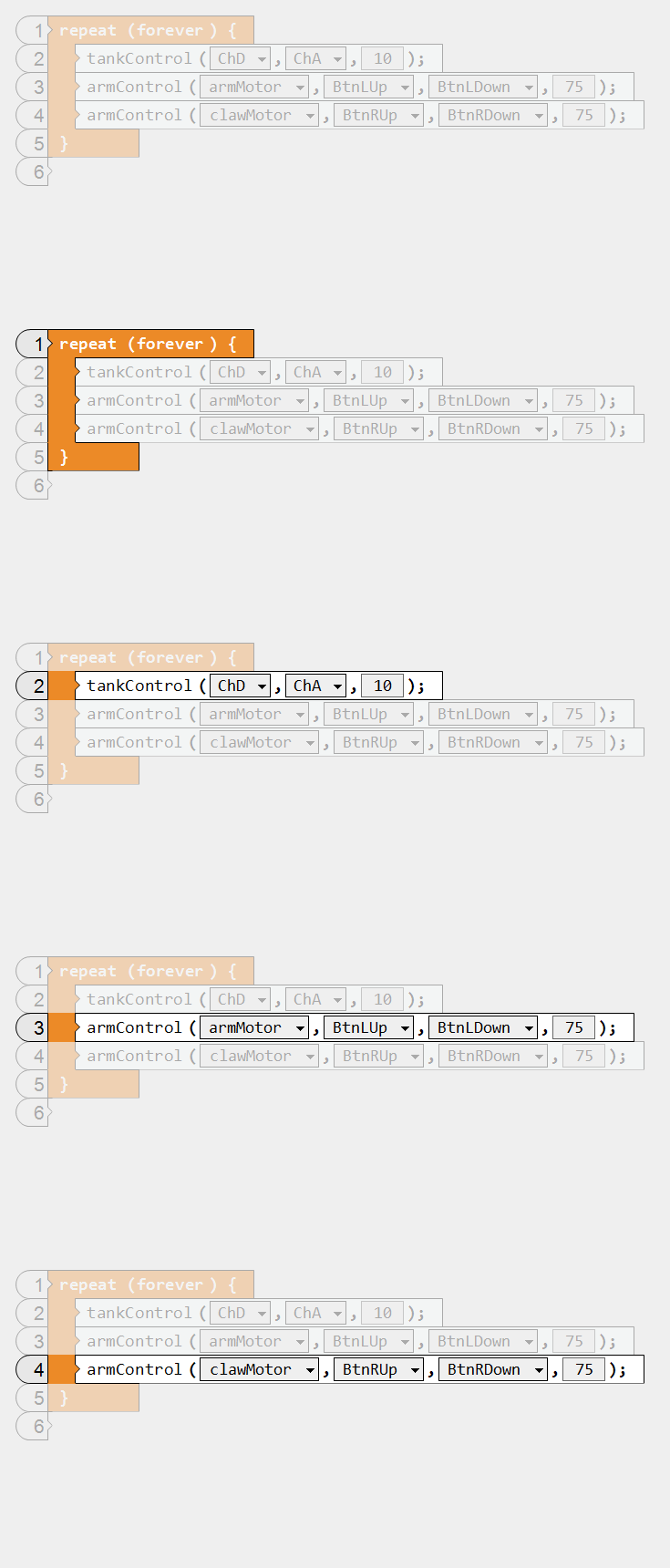
1_Repeat_
Always sends the program flow back to the
start of the loop when the flow reaches the end of the loop ('}')
Robot repeats the movements inside the loop forever.
2_TankControl_
Takes input value sfrom Joystick D(right) and A(left),
and applies it as the motor powers to the motors.
Uses inputs from the controller joystick to
drive the robot's motors.
3_ArmControl_
If Up-L button is pressed, drive armMotor at
positive 75% power. If Down-L button is pressed, drive armMotor at negative 75% power.
Uses inputs from Up-L and Down-L buttons to
control the robot arm.
4_ArmControl_
If Up-R button is pressed, drive clawMotor at
positive 75% power. If Down-R button is pressed, drive clawMotor at negative 75% power.
Uses inputs from Up-R and Down-R buttons to
control the robot claw.
Program Review: Wait for Button Press
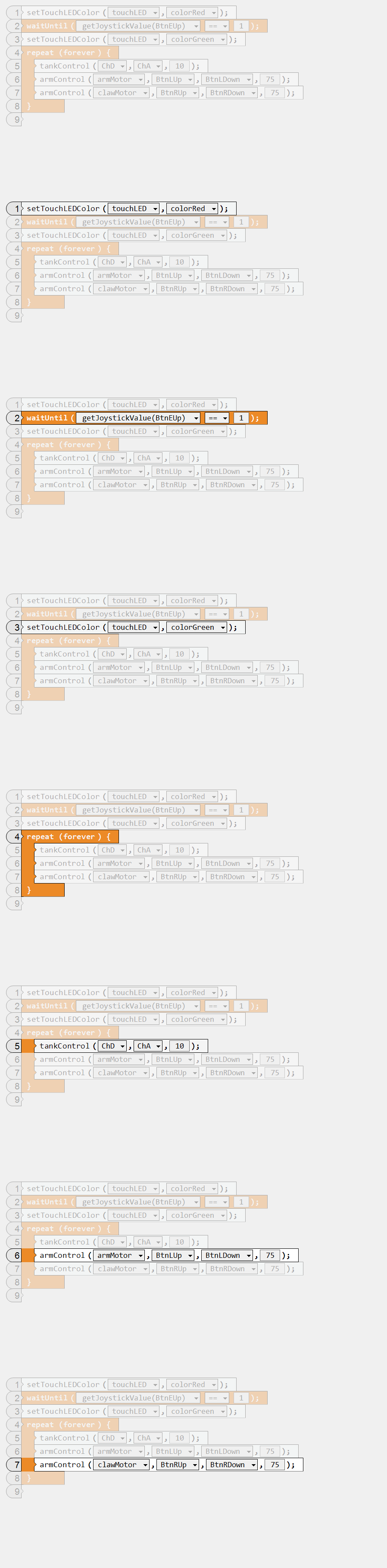
 1_SetTouchLEDColor_
Sets the value of the TouchLED as 'colorRed'
Lights TouchLED in Red.
1_SetTouchLEDColor_
Sets the value of the TouchLED as 'colorRed'
Lights TouchLED in Red.
2_WaitUntil_
Stops the program from processing additional
commands until the Up-E button value is '1'
Robot waits until Up-E button is pressed
before continuing the program.
 3_SetTouchLEDColor_
Sets the value of the TouchLED as 'colorGreen'
Changes the light on TouchLED with Green.
3_SetTouchLEDColor_
Sets the value of the TouchLED as 'colorGreen'
Changes the light on TouchLED with Green.
4_Repeat_
Always sends the program flow back to the
start of the loop when the flow reaches the end of the loop ('}')
Robot repeats the movements inside the loop forever.
5_TankControl_
Takes input value sfrom Joystick D(right) and A(left),
and applies it as the motor powers to the motors.
Uses inputs from the controller joystick to
drive the robot's motors.
6_ArmControl_
If Up-L button is pressed, drive armMotor at
positive 75% power. If Down-L button is pressed, drive armMotor at negative 75% power.
Uses inputs from Up-L and Down-L buttons to
control the robot arm.
7_ArmControl_
If Up-R button is pressed, drive clawMotor at
positive 75% power. If Down-R button is pressed, drive clawMotor at negative 75% power.
Uses inputs from Up-R and Down-R buttons to
control the robot claw.