1_RepeatUntil_Block
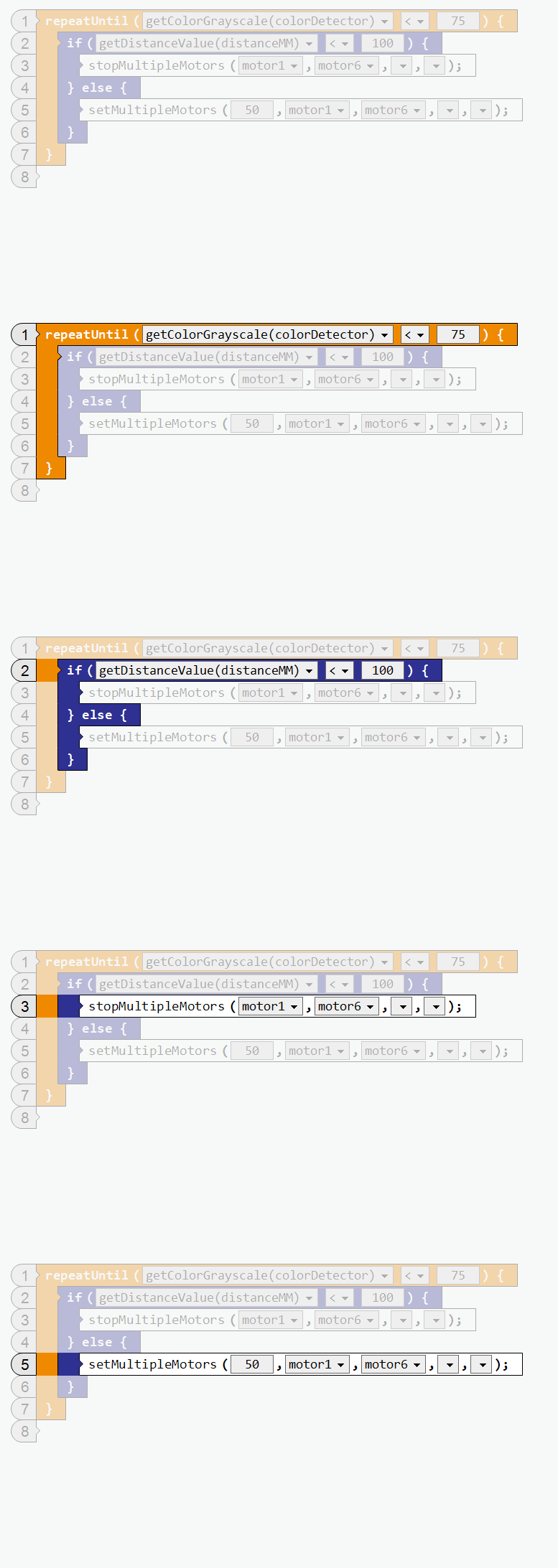
Conditionally sends the program flow back
to the start. Lets the flow out of the loop if the sensor's Grayscale value is
less than 75 at the beginning of the loop.
Robot repeats movements inside the
loop until the Color Sensor sees gray darker than the threshold (Black)
at the exact moment the loop starts.
2_IfElse2_Block
Checks whether the Distance Sensor value is less than '100'.
If it is, sends program flow to the 'if'(first) branch.
If not, sends program flow to the 'else'(second) branch.
Robot makes a decision based on
whether there is an object within 10cm.
3_StopMultipleMotors_
Stops motors 1 and 6.
Stops the robot if there is no
object within 10 cm in front of the Distance Sensor.
5_SetMultipleMotors_
Turns motors 1 and 6 On at 50% power.
Starts moving the robot forward.
StopMultipleMotors block will need to stop the robot later.