Program Review: Color Sensor Comparison
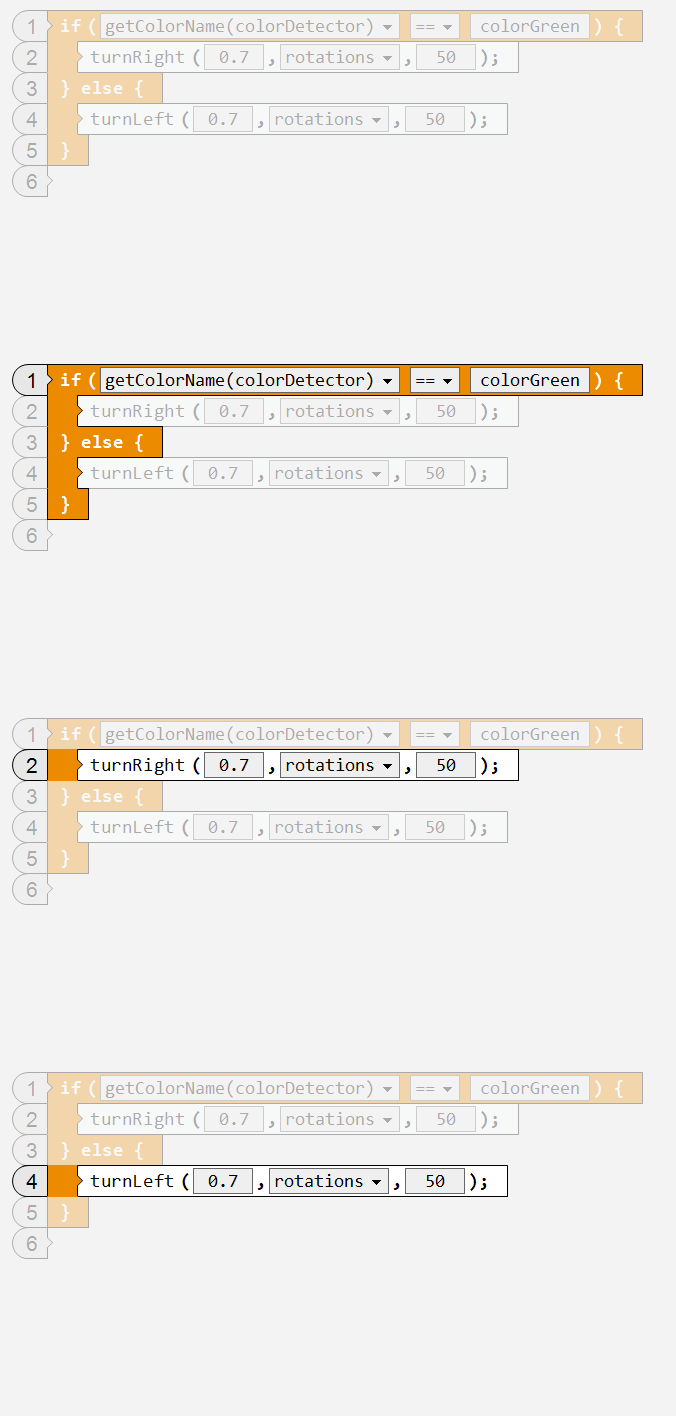
1_IfElse_Block
Checks whether the Color Sensor value is 'colorGreen'.
If it is, sends program flow to the 'if'(first) branch.
If not, sends program flow to the 'else'(second) branch.
Robot makes a decision based on
whether the Color Sensor sees Green or not.
2_TurnRight_
Turns in place to the right, for 0.7
rotations (approx. 90 degrees) at 50% power.
Turns 90 degrees to the right if
there is an object within 50cm.
3_TurnLeft_
Turns in place to the left, for 0.7
rotations (approx. 90 degrees) at 50% power.
Turns 90 degrees to the left if there
is NO object within 50cm.
Program Review: Tiled Maze
- The program shown below is a sample solution to the
Tile Maze Mini-Challenge
from If/Else 4.
- Note: the sample maze shown in the
Tile Maze Mini-Challenge will appear to require a
left turn, but it can be solved using only right turns! It is slow, but the
robot can figure its way out.
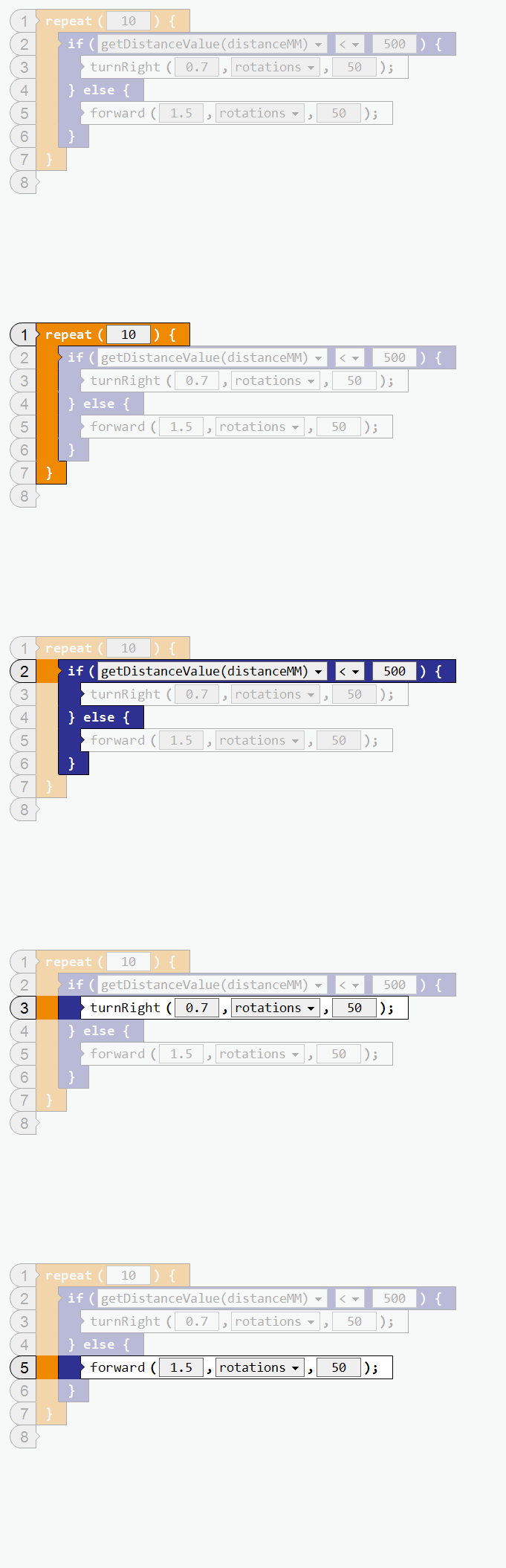
1_Repeat_Block
Always sends the program flow back to the
start of the loop when the flow reaches the end of the loop.
Robot repeats the movements inside
the loop forever.
2_IfElse2_Block
Checks whether the Distance Sensor value is less than '500'.
If it is, sends program flow to the 'if'(first) branch.
If not, sends program flow to the 'else'(second) branch.
Robot makes a decision based on
whether there is a maze wall within 50cm.
3_TurnRight_
Turns in place to the right, for 0.7
rotations (approx. 90 degrees) at 50% power.
Turns 90 degrees to the right to avoid
hitting the maze wall.
5_Forward_
Moves the robot forward 1.5 rotations
(approx. 30cm) at 50% power.
The robot drives 30cm forward. This would
be a single 'maze tile'.