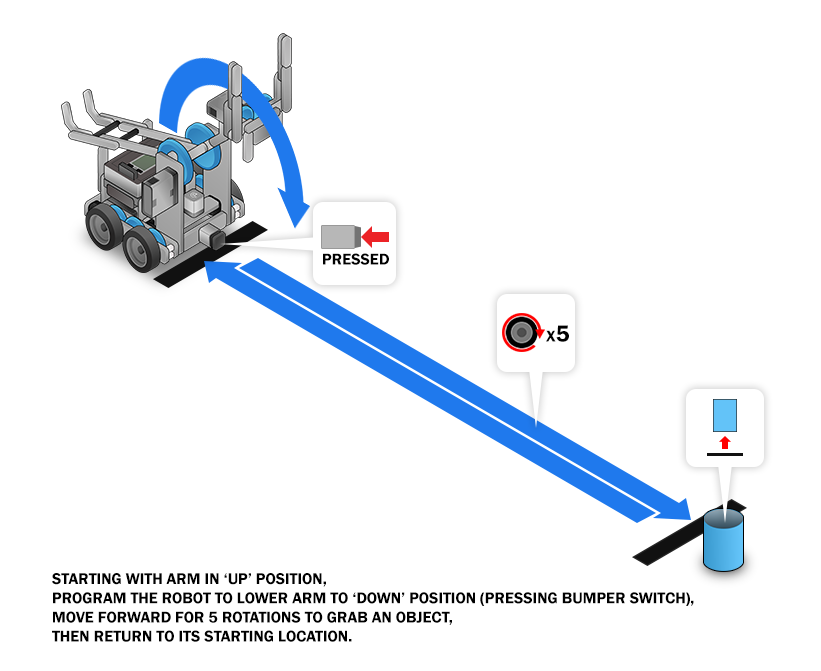
In this challenge, you will program your VEX IQ robot to lower its gripper to the 'Down'
position (acknowledged by arm touching the Bumper Switch), move forward for a certain distance,
then grab a container to bring it back to the starting location.
Challenge PDF[ VEXIQ_ArmPositionChallenge.pdf ]