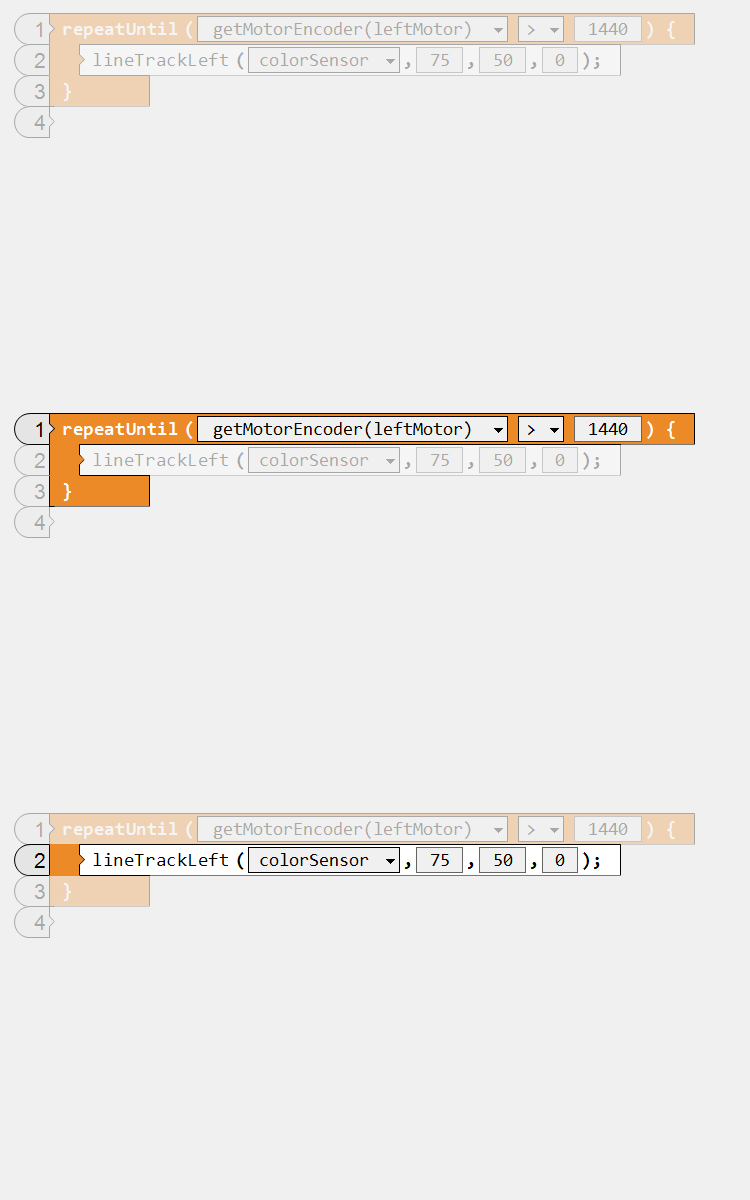
1_RepeatUntil_Block
Conditionally sends the program flow back
to the start. Lets the flow out of the loop if the left motor value is
greater than 1440 at the beginning of the loop.
Robot repeats movements inside the
loop until the left motor has traveled 4 rotations
at the exact moment the loop starts.
2_LineTrackLeft_
Chooses whether to turn the motors on for
left turn or right turn, using color reflected value of 75.
Tracks the left side of the line by alternating left and right motor
between 50% and 0% power.
Robot makes an instantanous decision to
turn left or right. By making this
decision repeatedly, the robot tracks the left side of the line.