Topics Covered
Lesson Links
| Virtual EV3 |
Choose the following configuration in RVW.

|
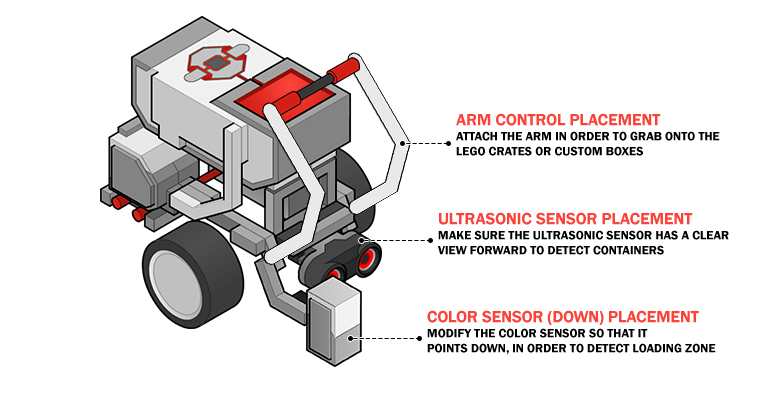
| Physical EV3 | (Building Instructions coming soon) |
![]()