1_SetMultipleMotors_Block
Turns motors B and C On at 20% power.
Starts moving the robot forward with Ultrasonic Sensor towards the wall.
StopMultipleMotors block will need to stop the robot later.
2_WaitUntil_first wait block
Stops the program from processing
additional commands until the Ultrasonic Sensor value is less than 25 ('< 25')
Robot waits until the wall is less than
25cm away.
3_SetLEDColor_first TOUCHLED block
Sets the value of the EV3's LED as 'ledRed'.
Turns EV3's LED red.
4_WaitUntil_first wait block
Stops the program from processing
additional commands until the Ultrasonic Sensor value is less than 10 ('< 10')
Robot waits until the wall is less than
10cm away.
5_SetLEDColor_
Sets the value of the EV3's LED as 'ledOrange'.
Turns EV3's LED Orange.
6_WaitUntil_first wait block
Stops the program from processing
additional commands until the Ultrasonic Sensor value is less than 50 ('< 50')
Robot waits until the wall is less than
50cm away.
7_SetLEDColor_
Sets the value of the EV3's LED as 'ledGreen'.
Turns EV3's LED Red.
8_StopMultipleMotors_
Stops motors B and C.
Stops the robot (after the WaitUntil block finishes).
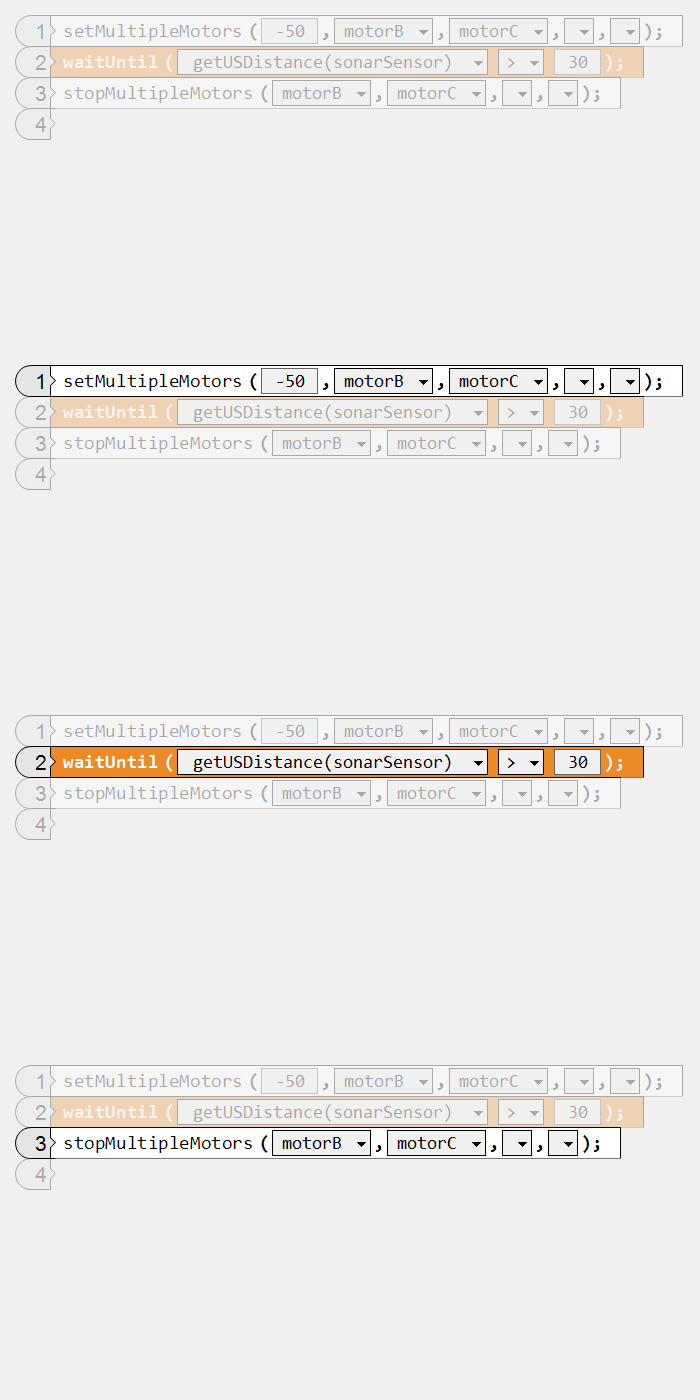
1_SetMultipleMotors_Block
Turns motors B and C On at -50% power.
Starts moving the robot backward, away from the wall.
StopMultipleMotors block wil bel needed to stop the robot later.
2_WaitUntil_
Stops the program from processing
additional commands until the Ultrasonic Sensor value is greater than 30 ('> 30')
Robot waits until the wall is more than
30cm away before continuing the program.
3_StopMultipleMotors_Blah
Stops motors B and C.
Stops the robot (after the WaitUntil block finishes).