Direction of Turn
Using the turnRight command block makes the robot turn to the right, in place. What happens if you use the turnLeft command instead? Try it!
| The robot turns in place to the left! |
Units of Turn
What happens if you switch the second box of the turnLeft or turnRight command from Rotations to Degrees? Try it!
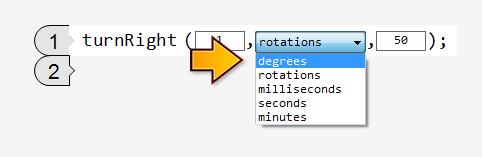
| The robot barely moves when it’s set to move 1 Degree! There are 360 degrees in one rotation of the motor, so it barely moves. |
|
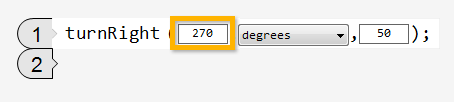
The motors turn ¾ of a rotation, making the robot turn much further.
Using degrees as your units gives you greater control over the robots turns! |
Mini Challenge 1: 90 Degree Turn Challenge
Program your robot to turn exactly 90 degrees to its right!
|

Change the amount your robot turns by changing the number of Rotations it is programmed to go.
Measure how far your robot turned with its 1 rotation program, and see if you can use that information to reason about how many rotations is should take to turn 90 degrees instead!
Mini Challenge 2: Dizzy Drill
Program your robot to run out to an obstacle, go around it, then come back.
You may use any kind of turn you want to complete this maneuver.
Did you notice?
Wheel Pointers
The white pointers on the EV3's tires help you to see how much the wheels are rotating.
Run your TurnLeftprogram again,
and watch the pointer on the robot's right wheel
Did you notice?
Wheels and Turning|
All your robot's movement is based on the way in which its two motors move.
The motion you get is determined by using different combinations of powers on those motors. |
|
 |
If both motors go forward, the robot moves straight forward. |
 |
If both motors run backward, the robot moves straight backward. |
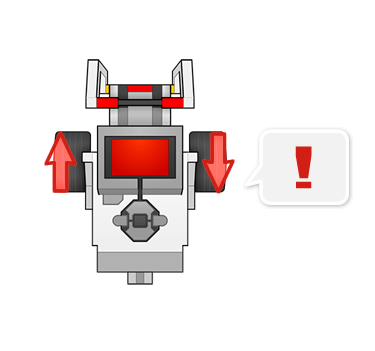 |
If they run in opposite directions, they robot spins in place. |
 |
If the left side moves forward while the right moves back, the robot spins to the right. |
 |
If the right side moves forward while the left moves back, the robot spins to the left. |